 da
da de
de en
en es
es fr
fr it
it nb
nb pt
pt sv
sv fi
fiSensoren voor objectdetectie: welke varianten zijn er en hoe werken ze?
Meer dan ooit tevoren wordt het motormanagementsysteem beïnvloed door signalen van buitenaf. Autonoom rijden gaat in de toekomst nog veel meer bepalen wanneer en hoe het motormanagement moet reageren. Functies zoals automatic emergency braking en adaptive cruise control zorgen er overigens nu al voor dat de ECU niet meer alleen op het gaspedaal reageert. En ook al zijn al die sensoren voor objectdetectie niet direct onderdeel van het motormanagementsysteem, voor een goed toekomstbeeld is het wel van belang hoe deze sensoren de werking van het motormanagement (gaan) beïnvloeden.
Ultrasoonsensoren & geluidsgolven
We beginnen bij de ultrasoonsensoren. Deze sensoren detecteren voorwerpen met behulp van geluidsgolven. Hierbij speelt het geen rol of het voorwerp doorzichtig of ondoorzichtig, ferro of non-ferro, vast, vloeibaar of poedervormig is. De sensor zendt via een emitter ultrasonische geluidsgolven uit die vervolgens botsen op mogelijke obstakels. Het terugkerende signaal wordt vervolgens door de detector opgepikt en een eenvoudige berekening volgt om de afstand tot het obstakel te bepalen:
D = 0,5T x C
‘D’ is hierin de afstand, ‘T’ de tijd die zit tussen het zenden en detecteren van de ultrasone geluidsgolven en ‘C’ de constante voor de snelheid waarmee de geluidsgolven voortbewegen: 343 meter per seconde. Onthoud deze berekening goed, want hoewel de ‘C’ per type sensor verschilt, gebruikt iedere sensor die afstand meet in principe dezelfde eenvoudige berekening.
Schematische afbeelding werking ultrasoonsensoren
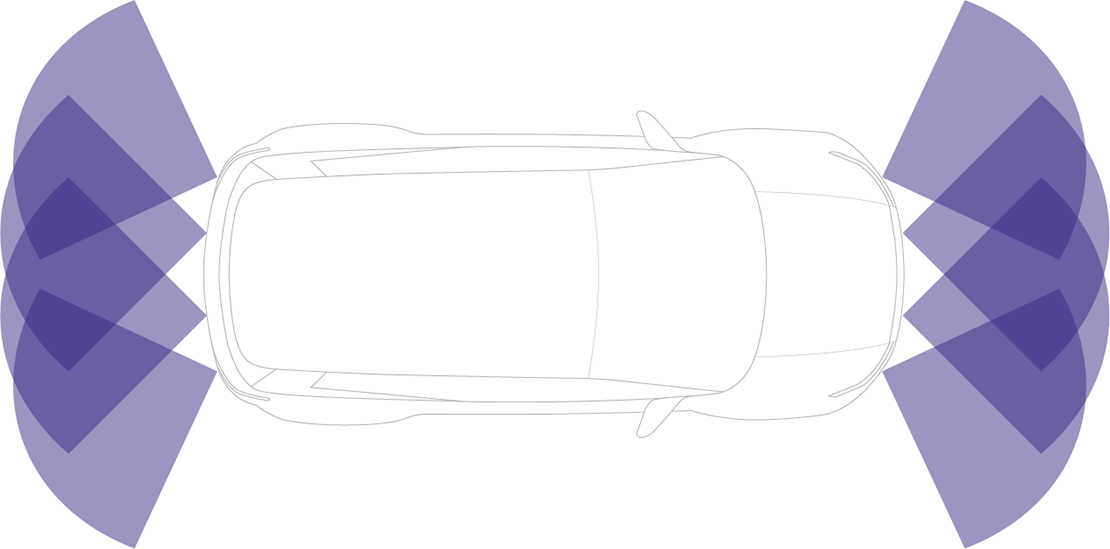
Ultrasoonsensoren worden vaak ingezet als parkeersensoren in de bumper. Daarmee zijn ze automatisch ook onderdeel van pre collision braking en automatic parking systemen. Signalen van ultrasoonsensoren worden daarom zelden ‘puur’ gebruikt, maar eerst verwerkt in een data acquisition unit. Wil je toch controleren of een ultrasoonsensor goed functioneert, meet dan niet alleen de voeding (meestal 5V) en massa door, maar controleer dan ook het ingaande en uitgaande signaal met een scoop.
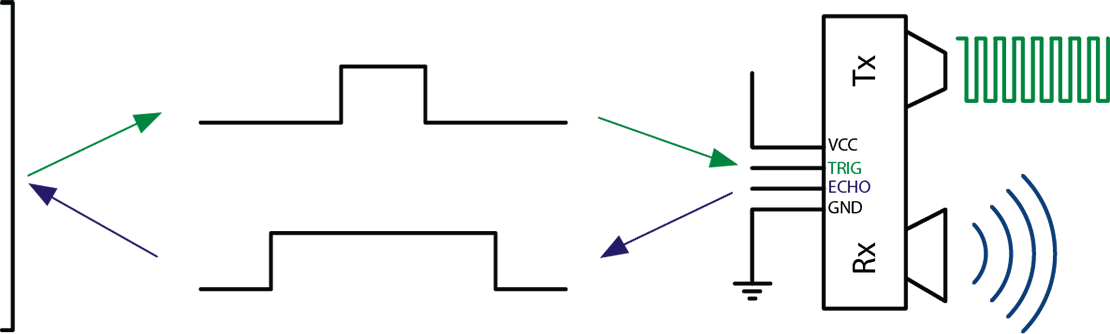
Blokgolf die via de scoop zichtbaar zou moeten zijn
Radarsensoren & radiogolven
Radar gebruikt radiogolven om de afstand, hoek en snelheid van voorbijkomende objecten te detecteren. Een mooi voorbeeld is de Beamsteering Radar SPEKTRA van Metawave, dat begin 2020 gepresenteerd werd. Metawave heeft namelijk een nieuw type radar ontwikkeld met een frequentie van 77 GHz(!). De radar scant supersnel in stapjes van slechts 0,1 graden de omgeving met een smalle hoek van 22 graden (Field of View). Hierdoor ontstaat extreem veel overlap waarmee de radar heel nauwkeurig de snelheid en bewegingsrichting van objecten kan detecteren, dus ook van overstekend verkeer. Het voorspellen van snelheid en bewegingsrichting was tot nu toe nog een groot probleem bij autonome voertuigen.
Door dit nieuwe type radar gaat er een wereld open voor autofabrikanten, want systemen zoals ADAS, blind spot monitoring, automatic emergency braking, adaptive cruise control, traffic jam autopilot, highway autopilot, lane assist enz. kunnen met gebruik van deze radar relatief eenvoudig geïmplementeerd worden. Voorheen was dit veel complexer te realiseren.
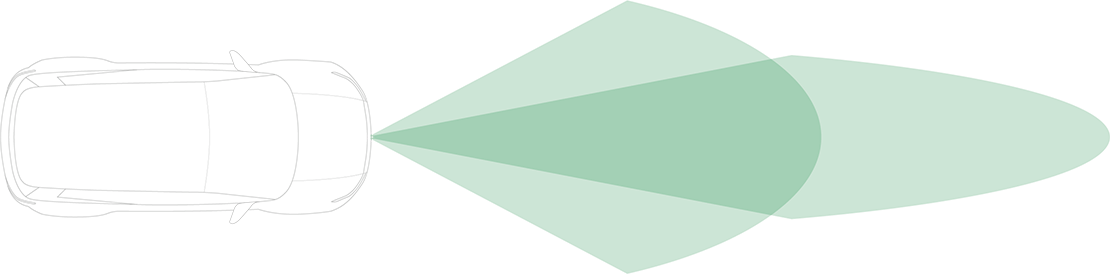
Schematische afbeelding werking radarsensoren
LiDAR & lichtpulsen
In plaats van radiogolven zendt LiDAR (LIght Detection And Ranging of Laser Imaging Detection And Ranging) infrarode lichtpulsen uit om objecten te detecteren. Door de snelheid en de kleine diameter van de lichtpuls is LiDAR ook in staat om zeer kleine voorwerpen te zien. LiDAR kun je dus eigenlijk zien als de snelle full-HD versie van radar. Dit maakt ook gedetailleerde 3D rendering van de omgeving mogelijk, een eigenschap die bijzonder goed van pas komt bij het realiseren van autonoom rijden. De techniek is nog wat duur en de LiDAR sensoren voor deze toepassing zijn nog wat aan de grote kant, maar experts binnen de auto-industrie geloven dat LiDAR in de toekomst van essentieel belang wordt bij het verder ontwikkelen van autonome voertuigen.
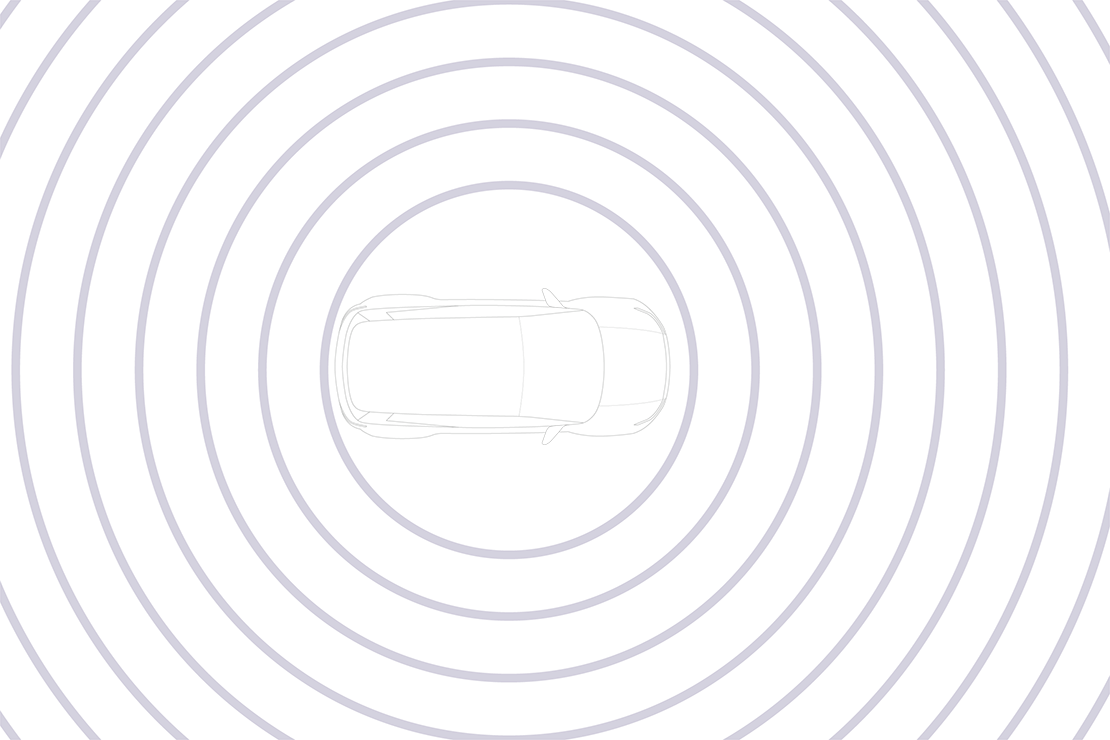
Schematische afbeelding werking LiDAR sensoren
Fun fact: Wist je dat LiDAR-sensoren inmiddels zelfs al in mobiele telefoons gebruikt worden? Zowel de nieuwere generaties van de Apple iPhone hebben zo’n sensor. De sensor is te herkennen aan het vlakke zwarte rondje naast de cameralenzen. Doordat deze mobiele telefoons nu dus diepte kunnen zien, biedt dit enorm veel mogelijkheden voor augmented reality toepassingen. Bovendien is het camerasysteem in staat om veel sneller en nauwkeuriger te focussen op een bepaald object.
Solid State LiDAR
In een poging om LiDAR goedkoper (en daarmee beter geschikt voor massaproductie) te maken, lijkt men zich in de auto-industrie ook steeds meer te focussen op ‘iPhone-achtige’ LiDAR-sensoren. Deze solid state sensoren zijn helaas niet in staat om al draaiend een volledig virtueel omgevingsbeeld te creëren, maar door samen te werken kunnen 9 van deze sensoren samen wél de volledige omgeving in beeld brengen. Naast de lagere kosten, heeft dit nog een voordeel: grote lelijke uitsteeksels zijn hiermee verleden tijd en dat helpt zowel de aerodynamica als het design van autonome voertuigen. Volkswagen, GM en een aantal Chinese automerken hebben bijvoorbeeld al flink geïnvesteerd in deze technologie.
FIR & infrarode lichtgolven
Maar ook al wordt er momenteel veel tijd gestoken in de ontwikkeling van radar en LiDAR voor autonoom rijden, beide technieken hebben ook zo hun nadelen. Daarom kijkt men inmiddels ook naar een andere (door het leger veel gebruikte) techniek: Far Infrared Technology (FIR). Een FIR-camera ‘ziet’ infrarode lichtgolven en kan dit omzetten naar een beeld. De camera kan dit omdat elk object of materiaal een eigen temperatuur uitstraalt.
In tegenstelling tot radar en LiDAR, genereert FIR echter geen directe 3D omgeving. Daarom verwachten we in de toekomst een combinatie van meerdere technieken. Dit gaat echter wel een enorme datastroom veroorzaken. Daarnaast zijn er ook verschillende fabrikanten die zich richten op een camerasysteem om autonoom rijden mogelijk te maken.