 da
da de
de en
en es
es fr
fr it
it nb
nb pt
pt sv
sv fi
fiHoe Automotive Ethernet bijdraagt aan de ontwikkeling van Domain Controllers
Er was een tijd waarin iedere control unit in de auto volledig stand-alone opereerde en dus zijn eigen sensoren en actuatoren had. Deze sensoren en actuatoren waren dan ook direct verbonden met de control unit. Simpel en doeltreffend. Echter, naarmate het aantal sensoren, actuatoren en control units bleef oplopen, groeiden de kabelbomen mee. Al snel was er letterlijk kilometers kabel nodig en het overzicht was ver te zoeken. Dat moest beter kunnen.
En dat is waarom begin jaren ’90 het CAN-netwerk geïntroduceerd werd. Control units konden daarmee ineens onderling informatie uitwisselen, waaronder dus ook signalen van sensoren. Een ware revolutie in de autowereld. Sindsdien is de netwerk-architectuur binnen een voertuig alsmaar verder ontwikkeld. En met de komst van elektrische aandrijflijnen en autonome technologie zullen er in de nabije toekomst gegarandeerd nog grotere stappen gemaakt worden.

Maar dit betekent dus ook dat er veel gaat veranderen in de manier waarop elektronica in een voertuig geïmplementeerd wordt. Lang verhaal kort: binnen 10 jaar zal een domain controller of supercomputer de leiding krijgen over alle functies binnen de gehele aandrijflijn. De ECU zoals we die nu kennen, krijgt dan een meer ondergeschikte rol. En naarmate deze domain controllers en de daarbij horende netwerken zich verder door ontwikkelen, gaan de afzonderlijke control units langzaam verdwijnen (ja, ook de ECU), tot er uiteindelijk alleen nog een handvol domain controllers of supercomputers de dienst uitmaken.
Maar voor het zover is, willen we wat meer uitleggen over het netwerk dat hierin een belangrijke rol in gaan spelen. Want ondanks dat Automotive Ethernet al geruime tijd beschikbaar is, wordt de vernuftigheid ervan steeds groter.
Het begin: Een centrale gateway
De autobranche is continu op zoek is naar steeds meer data-snelheid en steeds meer mogelijkheden voor onderlinge communicatie. Al in 2004, nog tijdens de ontwikkeling van het FlexRay netwerk, realiseerden de autofabrikanten zich dat ze een nieuwe weg in moesten slaan betreft de communicatie tussen de verschillende control units. De grootte van software-updates begon flink uit de hand te lopen en met de snelheid van het op dat moment gebruikte HS CAN zou een update letterlijk tientallen uren gaan duren. Onwerkbaar voor in de garage natuurlijk.
De oplossing kwam in 2008 in de vorm van een centrale gateway, die niet alleen de taak had om data uit te wisselen tussen de verschillende bestaande CAN-, FlexRay- en MOST- (Media Oriënted Systems Transport) netwerken, maar die ook diende als interface naar de buitenwereld voor diagnose en programmering (software updates e.d.). BMW was de eerste met zo’n nieuwe centrale gateway.
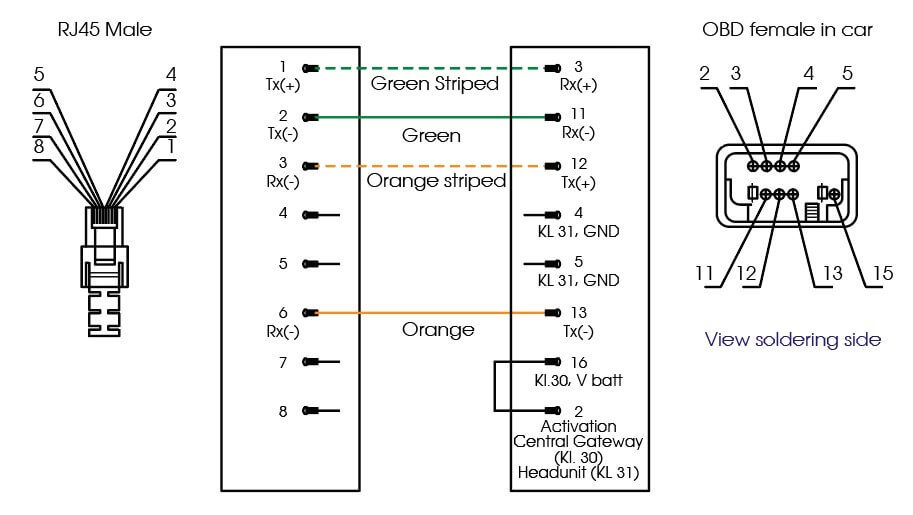
Pin 3, 11, 12 en 13 in de OBDII-poort worden gebruikt om via een Ethernet-verbinding te communiceren met de buitenwereld
De OBDII-poort had dus niet langer twee CAN-lijnen om de dealer-apparatuur te laten communiceren met de auto, maar vier Ethernet-lijnen, die precies corresponderen met de RJ-45-connector die we zo goed kennen van het Ethernet in computernetwerken. Pin 3, 11, 12 en 13 in de OBDII-poort worden dus gebruikt om via een Ethernet-verbinding te communiceren met de buitenwereld.
Ethernet-standaard voor de autobranche: 100BASE-T1
De techniek van Ethernet bestond natuurlijk al een tijdje. Maar een toepassing voor de autobranche was er vanwege de zeer strenge eisen op het gebied van chips en andere elektronische componenten niet. Tot 2004 was Ethernet nooit gebruikt binnen voertuigen en dus moest er een hele nieuwe range aan chips, semiconductors en switches ontwikkeld worden, speciaal voor deze doeleinden. En ook de bekabeling was een uitdaging, want om meerdere redenen was er de wens om 100 Mbps te bereiken op een Unshielded Twisted Single Pair kabel (een kabel net zoals CAN en FlexRay). Uiteindelijk ontstond daardoor een nieuwe Ethernet-standaard speciaal voor de automotive: 100BASE-T1. Deze werd in 2013 geïntroduccerd en beschikte over een data-rate van 50 Mbps. In 2020 werd de 1000BASE-T1 geïntroduceerd die een date-rate van 1000 Mbps (1 Gbps) kan leveren. Inmiddels wordt er al hard gewerkt om snelheden van 50 Gbps te bewerkstelligen.
Mogelijkheden voor de toekomst
Omdat Ethernet overal in het dagelijks leven is ingeburgerd, zijn de mogelijkheden inmiddels eindeloos. De computertechnologie van de huidige pc’s, laptops en tablets kan met de komst van Automotive Ethernet ook geïmplementeerd worden in voertuigen. Dit betekent dus ook dat grafische rekenkracht voor autonoom rijden niet langer een probleem is.
Om een helder beeld te krijgen van de transformatie in de netwerk-architectuur, is het nodig om je te realiseren hoe de communicatie in huidige (3e generatie) voertuigen geregeld is. In de afbeelding hieronder is de centrale gateway als het grootste paarse blok weergegeven. De kleinere groene blokken zijn control units die elk in hun eigen communicatienetwerk hebben: LIN, CAN of FlexRay.
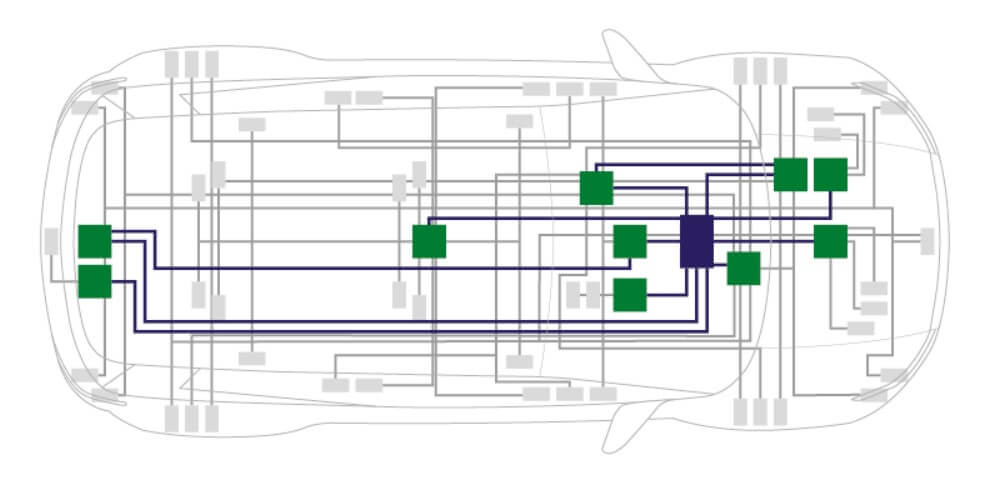
Communicatie netwerk-architectuur in huidige (3e generatie) voertuigen
Echter, het aantal control units begint aardig uit de hand te lopen en bovendien zullen de huidige control units hun taken in de nabije toekomst niet meer aankunnen. Onder de centrale gateway zullen daarom domain controllers komen te staan die allen ook communiceren over het Ethernet (ook paars weergegeven). Eén van die domain controllers zal zich puur richten op alle data en functies rondom autonoom rijden. In dit 4e generatie netwerk zullen control units en subnetwerken zeker nog bestaan, maar heeft het netwerk de snelheid daar waar het nodig is.
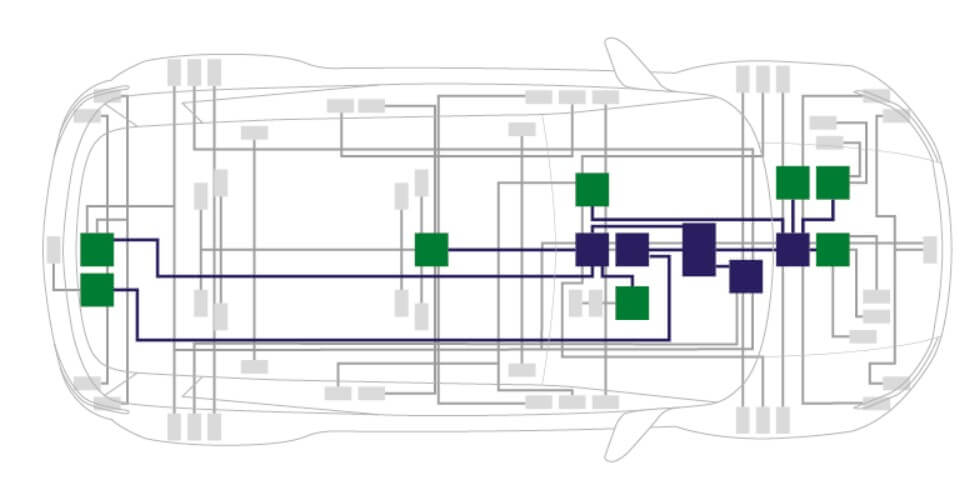
Communicatie netwerk-architectuur in (4e generatie) nabije toekomst voertuigen
Het is moeilijk te voorspellen hoe een 5e-generatie-netwerk er precies uit gaat zien in de praktijk, maar na de implementatie van domain controllers verwacht men wel een duidelijke trend: de structuur wordt aanmerkelijk minder complex middels het massaal reduceren van componenten. De komst van slimme sensoren en actuatoren gaat het gebruik van control units geheel overbodig maken. Wat overblijft is een lichtgewicht maar krachtig netwerk van enkele domain controllers of supercomputers die door nauw samen te werken alle systemen binnen het voertuig zullen managen.