 da
da de
de en
en es
es fr
fr it
it nb
nb pt
pt sv
sv fi
fiSnelheidssensoren en sensorringen: alles wat je moet weten
We zijn er inmiddels aan gewend geraakt dat de snelheidssensoren zich rondom het wiellager bevinden, maar dit was lang niet altijd het geval. Voordat ABS zijn intrede deed, werd de snelheid vaak direct vanuit de versnellingsbak of het differentieel gemeten. Later verplaatsten de sensoren zich via de aandrijfassen naar de wiellagers. In de loop der jaren zijn er tal van varianten verschenen. We zullen deze varianten en hun eigenschappen daarom per stuk behandelen.
Verschillende soorten sensorringen
Om de snelheidssensor de rotatie te laten meten, maakt het ABS-systeem gebruik van sensorringen. Deze ringen hebben metalen tanden of wisselende magnetische polen om een signaal te kunnen genereren.
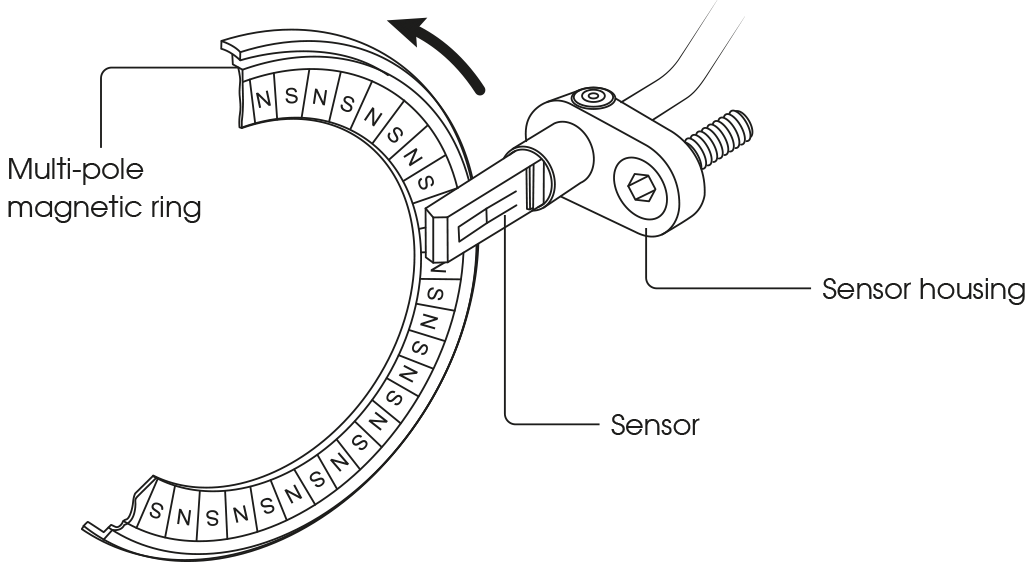
Echter, omdat de getande ring toch wel wat nadelen had (gewicht, verstoring door vuil en schade) en omdat er na verloop van tijd dankzij doorontwikkeling meer nauwkeurigheid en functionaliteit gewenst was, werd er overgestapt naar een magnetische ring op het wiellager zelf. De ring is zo mooi weggewerkt in het ontwerp, dat je aan een wiellager tegenwoordig niet eens meer kan zien dat deze over een ABS-functie beschikt.
Doordat het magnetisme zich nu verplaatst had van de sensor naar de sensorring, bood dit bovendien mogelijkheden voor verdere ontwikkeling van de snelheidssensor.
Door vervuiling of beschadiging van de sensorringen kan het signaal af gaan wijken, wat tot vreemde storingen kan leiden. Wij raden daarom dringend aan om bij elke storing eerst de sensorringen grondig te controleren!
Passieve sensoren (DF6)
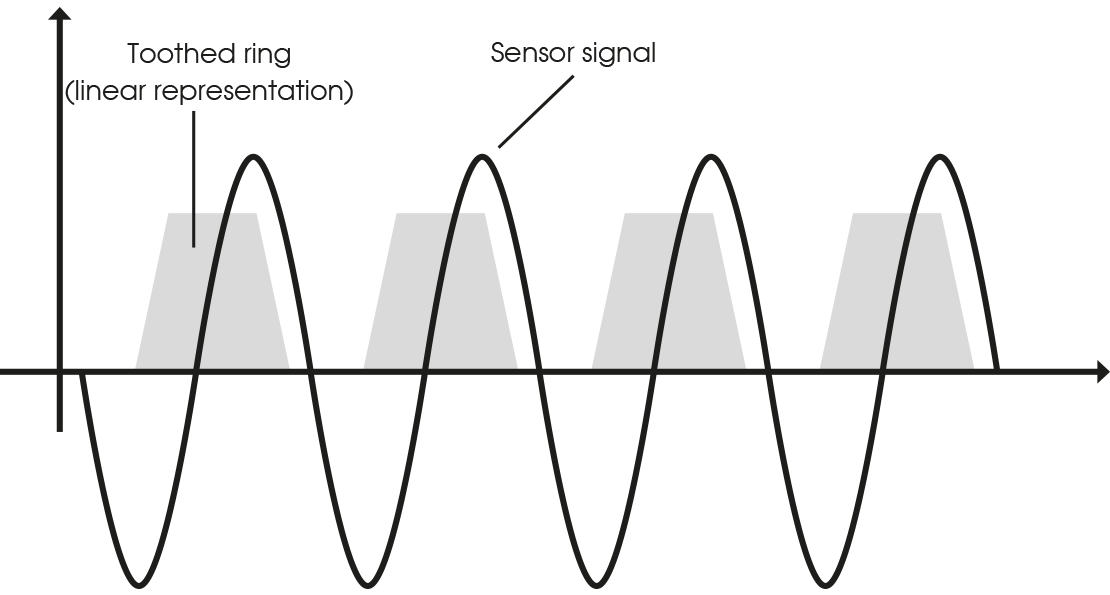
Zo ongeveer tot 2003 werden voertuigen vooral uitgerust met passieve wielsensoren, ook wel DF6-sensoren genoemd. Dit type sensoren werkt eigenlijk altijd met getande metalen sensorringen. De sensor zelf is voorzien van een permanente magneet met daar omheen een spoel.
Zolang het wiel draait, zorgen de tanden van de ring voor een variabel magnetisch veld, dat een steeds wisselend voltage genereert in de spoel: een sinusvormig analoog voltage-signaal wordt verstuurd naar de ABS-ECU. Hoe hoger de draaisnelheid, hoe hoger de amplitude van het signaal. Bij erg lage snelheden is de amplitude echter zo klein, dat de ABS-ECU geen signaal opmerkt. Ga er dus vanuit dat het signaal pas vanaf zo’n 30 km/h sterk genoeg is.
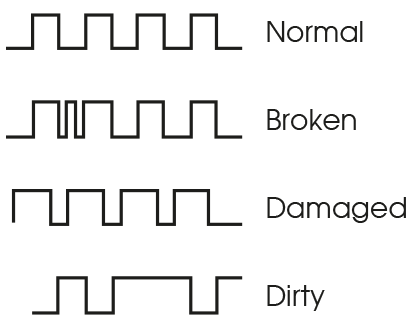
Zowel de passieve sensor als de getande sensorring zijn vrij eenvoudig zelf te testen. Veel diagnose-apparatuur kan livedata van de wielsnelheid laten zien. Beschik je niet over dergelijke diagnose-apparatuur, dan kan een scoop ook uitkomst bieden: controleer het signaal van de sensor door de signaaldraad van de sensor te verbinden aan de scoop. Draai nu aan het wiel: er zou een sinusvormig signaal moeten verschijnen (meestal 0,5V - 1,0V). Let goed op afwijkingen in het signaal, veroorzaakt door beschadigingen aan één of meerdere tanden. Wil je alleen de sensor controleren, beweeg dan snel meermaals met een metalen schroevendraaier langs de sensor. Hoewel de vorm van het signaal niet veel zegt, kun je zo wel controleren of de sensor überhaupt reageert.
Actieve sensoren (DF10)
Sinds 2003 zijn veel autofabrikanten op actieve wielsensoren overgestapt. Bij de kenners staat de eerste versie hiervan bekend als DF10-sensor. Dit type sensor heeft een veel grotere nauwkeurigheid en is niet meer snelheidsafhankelijk: iedere puls heeft een gelijke amplitude waardoor iedere snelheid (dus zelfs stilstand) meetbaar is. Zo’n signaal wordt ook wel een bloksignaal genoemd.

Hoewel DF10-sensoren al veel voordelen hebben ten opzichte van de oudere DF-6 standaard, gebruikten deze sensoren in het begin nog wel tandringen. Daarom beschikten deze sensoren ook nog over een interne magneet om zo zelf een magnetisch veld te kunnen genereren. Vanaf 2006 verschenen er steeds meer systemen waarbij wel al gebruik gemaakt werd van een magneetring. Deze sensoren hebben dan ook geen interne magneet meer nodig.
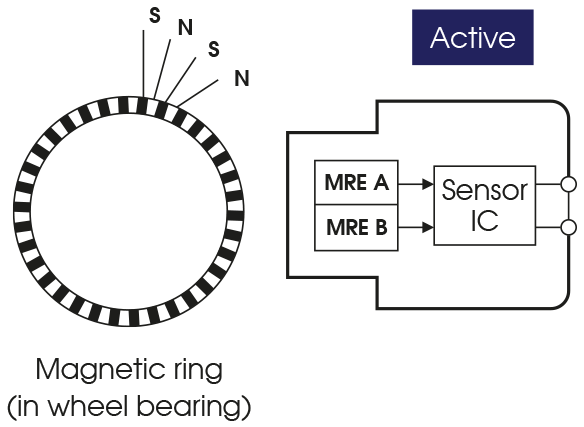
De DF10-sensor heeft spanning nodig om te functioneren, daarom worden ze actieve sensoren genoemd. De sensor beschikt daarom over twee draden: de eerste voor voeding (vaak 12V, maar 5V komt ook af en toe voor) en de tweede voor massa. De signaal-output naar de ABS ECU loopt over één van deze draden: dit verschilt per auto. In de sensor vinden we een halfgeleider, ook wel een Magneto Resistive Element (MRE) genoemd, die zowel als geleider of als isolator kan functioneren. Door het draaien van de sensorring zal de halfgeleider de output afwisselend in- en uitschakelen. Dit genereert een digitale blokgolf dat naar de ABS ECU wordt verstuurd. Met een scoop is het mogelijk om dit signaal te bestuderen.
Handige waarden voor diagnose:
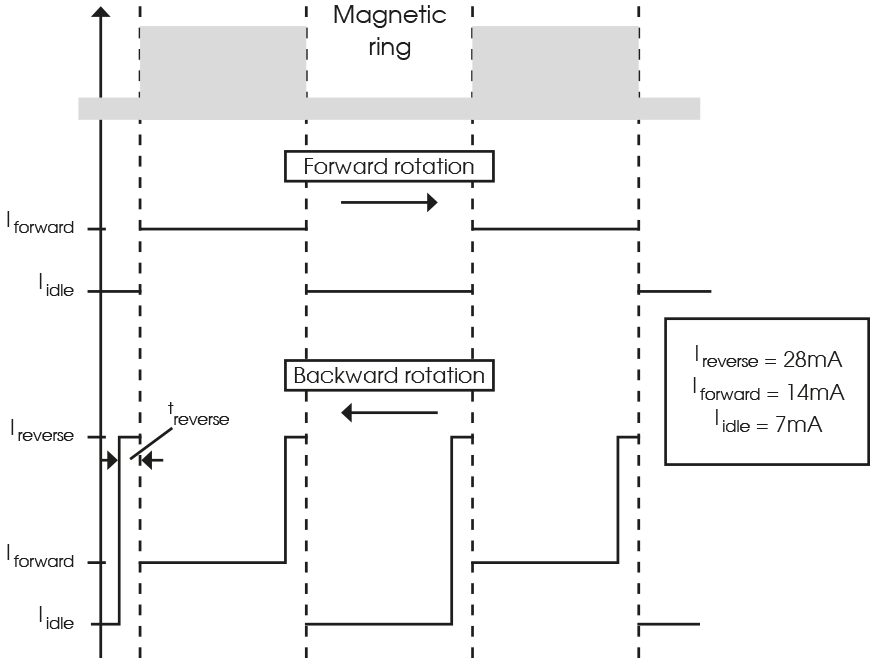
Zoals in de diagram hieronder te zien is, heeft het bloksignaal een vaste waarde van 7 mA, 14 mA of 28 mA. Een welkome aanvulling op de bestaande functionaliteit, was het zichtbaar maken van achteruit rijden. Daarom werd de DF10-RotDir in het leven geroepen. Deze sensor is in staat om, naast het standaard bloksignaal, een extra signaal mee te sturen zodra er achteruit gereden wordt.
Meer intelligentie (DF11i)
Door veelvuldig gebruik van CAN en andere communicatiesystemen elders in het voertuig, besefte men dat een signaal vanaf een snelheidssensor veel meer informatie zou kunnen geven dan slechts de rotatiesnelheid. Naast de draairichting, waarvoor de DF10-RotDir al een mooie oplossing had, kon bijvoorbeeld ook een extra controle van het beschikbare magnetische veld in het signaal ingebouwd worden.
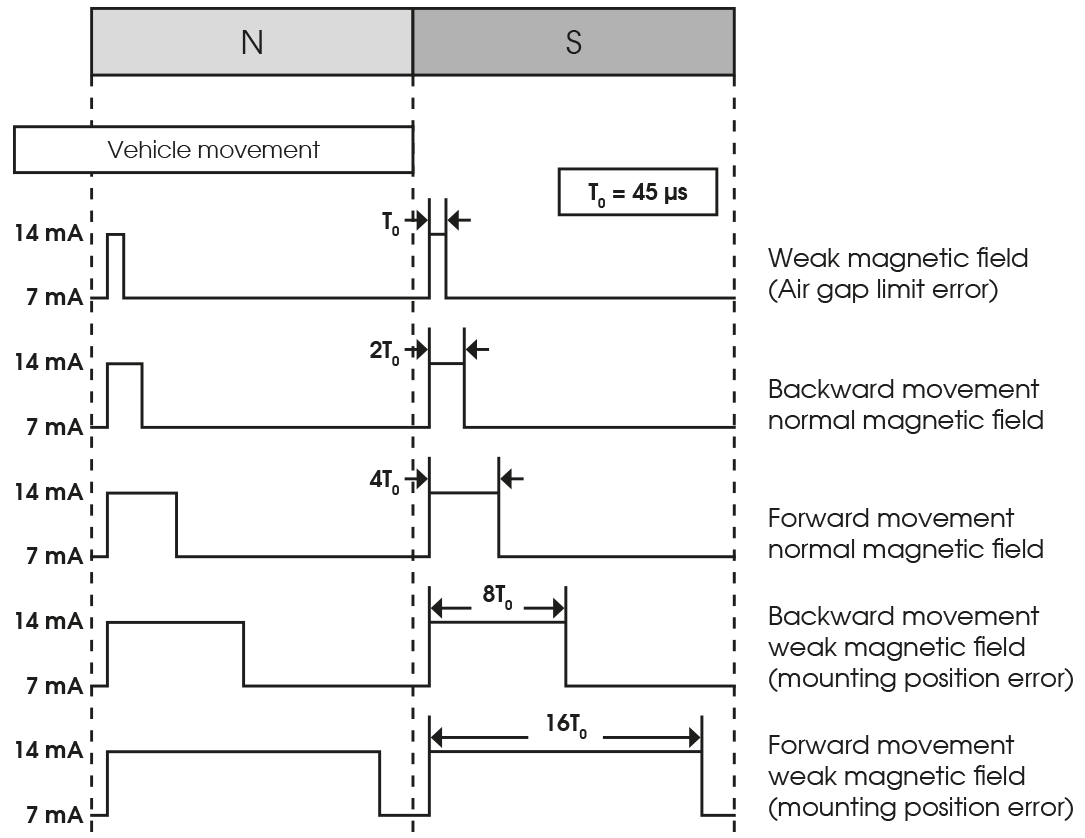
Om dit mogelijk te maken moest de snelheidssensor daarom verschillende signalen kunnen genereren voor verschillende situaties. Men koos daarom voor PWM: Pulse Width Modulation. Het principe van dit protocol is eigenlijk heel simpel: er wordt een standaardlengte voor de puls bepaald (in het geval van DF11i is dit doorgaans 45 μs) en door deze puls met een factor 2, 4, 8 of 16 te verlengen, krijgt de ABS-ECU meer informatie mee dan alleen het pulsmoment zelf. Wellicht dat dit schema het principe nog net iets duidelijker maakt:
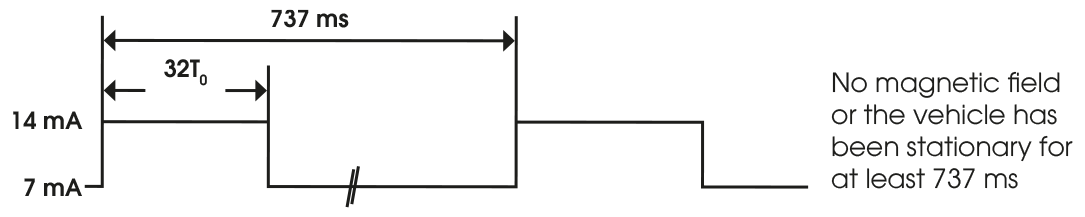
Daarnaast kregen DF11i-sensoren nóg een slimme functie ‘ingeprogrammeerd’: het verschil tussen nulsnelheid en een niet functionerende sensor. Staat het voertuig stil, dan zal een DF11i nog steeds periodiek een puls verzenden naar de ABS ECU om zo te laten weten dat de sensor nog operationeel is. Dit gebeurd doorgaans elke 737 ms met een puls die een factor 32 is verlengd.
Leuke weetjes:
We hebben geen idee of het je al opgevallen was, maar is het niet vreemd dat al deze types met de letters ‘DF’ beginnen? Dat komt doordat de knappe koppen van Bosch GmbH aan de basis staan van deze moderne sensortechnologie: ‘DF’ staat voor ‘Drehzahlfühler’, wat Duits is voor toerentalsensor.
Zelfs van DF11i is nog een versie gemaakt met een interne magneet, zodat deze (net zoals een aantal versies van DF10) met de ouderwetse tandring kan werken. Dit type wordt DF11iM genoemd.
De nieuwe standaard (VDA)
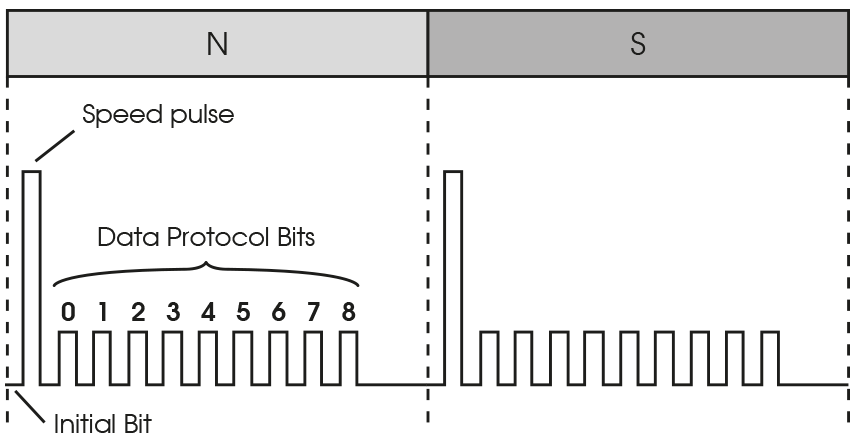
Door ontwikkelingen als ‘PSI5’ voor onder andere het airbagsysteem, heeft ook de snelheidssensor de volgende stap kunnen maken. Een VDA-sensor stapt definitief af van het geven van 1 puls. In plaats daarvan genereert deze sensor een bericht van een 9 bits na de puls, waarvan de puls-amplitude overigens 2x zo hoog is als die van de bits. Daarmee wordt niet alleen het versturen van zeer specifieke informatie mogelijk, maar maakt het de sensor ook programmeerbaar. Het protocol dat hiervoor gebruikt wordt, heet het ‘AK-protocol’. Er is bekend dat bepaalde sensoren van Infineon werken volgens AK-protocol 4.0 dat in februari 2008 door Daimler AG is uitgebracht, maar inmiddels worden er ook al nieuwere varianten gebruikt.
Je bent vast nieuwsgierig naar de functie van deze 9 bits, maar hier kunnen we slechts gedeeltelijk antwoord op geven. De meeste bits zijn namelijk vrij programmeerbaar, waardoor de functie per automerk en model kan verschillen.
Bij vervanging altijd originele wielsensoren gebruiken!
ACTRONICS raadt aan om bij het vervangen van de wielsensoren altijd voor OEM te kiezen. Tevens dienen deze sensoren op chassisnummer of kenteken uitgezocht te worden, dit omdat er veel verschillende types verkrijgbaar zijn die aan de buitenzijde allemaal op elkaar lijken. Het monteren van een foutieve wielsensor kan de monteur op een dwaalspoor zetten, omdat de sensor in principe wel functioneert, maar het signaal afwijkt van wat de ECU verwacht te ontvangen. De ECU zal dan meestal foutcodes gaan geven met betrekking tot ‘impendantie’ van de wielsensor.
Vervuiling, schade en speling op wiellagers
Controleer bij wielsensorklachten altijd de wiellagers op vervuiling, schade en speling. Het signaal dat de magneetring of tandring dient te genereren heeft weinig tolerantie en een kleine afwijking kan daarom al direct een storing veroorzaken.
Zelf meten aan wielsensoren
Al deze soorten wielsensoren zijn gelukkig nog steeds zelf met een scoop testbaar. Door een flinke slinger aan een wiel te geven bij ingeschakeld contact (belangrijk!) kun je relatief eenvoudig beoordelen of de sensoren en sensorringen nog naar behoren werken. Het gebruiken van een metalen (=tandring) of magnetische (=magneetring) schroevendraaier kan natuurlijk ook uitkomst bieden. Een goede beoordeling van het gegeven signaal is daarbij wel heel belangrijk. Gebruik daarom altijd een voorbeeldsignaal om goed te kunnen vergelijken. Om verder een beetje duidelijkheid te geven in de onderlinge verschillen tussen deze signalen, hebben we een korte samenvatting voor je:
DF6
Een sinussignaal, meestal tussen 0,5V en 1,0V. De amplitude stijgt naarmate het wiel sneller draait.
DF10
Een bloksignaal met een vaste amplitude van 7 mA, 14 mA of 28 mA. De frequentie van de bloksignalen stijgt naarmate het wiel sneller draait. Types met RotDir-functie genereren bij achteruit draaien een tweetraps-bloksignaal.
DF11i
Een PWM-signaal met een signaallengte van 45 μs. Bij vooruit draaien is dit signaal een factor 4 verlengd, dus zou het ‘signaalblok’ 180 μs lang moeten zijn. Bij achteruit draaien is het signaalblok met een factor 8 verlengd, dus 360 μs lang. Staat het wiel stil, dan genereert de sensor elke 737 ms een signaalblok van 1440 μs lang (32x de signaallengte). Er is dus altijd een signaal meetbaar.
VDA
Een VDA-sensor genereert bij het draaien van het wiel een snelheidspuls, gevolgd door een signaal met 9 bits. Factoren zoals draairichting worden in dit signaal meegezonden. Draait het wiel niet, dan zal dit signaal nog steeds verzonden worden, echter dan zonder de snelheidspuls. Er is dus altijd een signaal meetbaar.
LET OP: Er zijn gevallen bekend waarbij er verschil zit tussen het type sensor dat gebruikt wordt bij de voorwielen en bij de achterwielen. Wissel deze sensoren dan ook niet onderling met elkaar uit!